


A Tesla revelou parte de sua tecnologia de robô humanoide por meio de registros para várias novas patentes relacionadas ao seu programa de robôs Optimus. Recentemente, a Tesla apresentou o “Optimus Gen 2”, uma nova geração de seu robô humanoide que deveria ser capaz de assumir tarefas repetitivas dos humanos. O novo protótipo mostrou muitas melhorias em comparação com as versões anteriormente desanimadoras do robô, o que deu alguma credibilidade ao projeto.
Uma das principais mudanças com o Optimus Gen 2 é o fato de a Tesla agora estar usando todos os seus próprios atuadores personalizados projetados internamente para alimentar os membros do robô. Agora, a Tesla registrou várias patentes relacionadas à tecnologia por trás de seu robô humanoide.
No primeiro pedido de patente, a Tesla descreve sua ‘metodologia de design de atuadores e atuadores’: um sistema ou metodologia de controle de movimento de um robô usando atuadores, onde o sistema pode incluir um ou mais tipos de atuadores posicionados em locais de torso, ombro e quadril do robô; um ou mais segundos tipos de atuadores posicionados em locais de pulso do robô; um ou mais terceiros tipos de atuadores posicionados em locais de pulso do robô; um ou mais quartos tipos de atuadores posicionados em locais de cotovelo e tornozelo do robô; um ou mais quintos tipos de atuadores posicionados em locais de torso e locais de quadril do robô; e um ou mais sextos tipos de atuadores posicionados em locais de joelho e locais de quadril do robô.
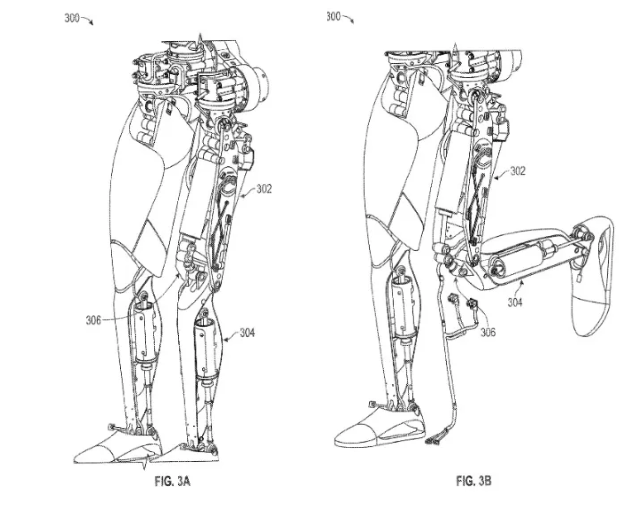
Curiosamente, o primeiro Gen Optimus aparece nessas ilustrações para o primeiro pedido de patente. As outras aplicações de patente apresentam imagens do novo Optimus. A próxima patente é chamada de ‘Sistemas e métodos para uma montagem de junta de joelho de robô’ e, como o nome sugere, é especificamente sobre o joelho do robô. A Tesla descreveu a tecnologia em sua aplicação de patente: revela-se aqui uma montagem de junta do joelho incluindo um primeiro membro de ligação tendo uma primeira extremidade mecanicamente acoplada a uma perna superior de um robô e configurada para girar em torno de um primeiro pivô em relação à perna superior, e um segundo membro de ligação tendo uma primeira extremidade mecanicamente acoplada a uma perna inferior do robô. A perna inferior pode ser mecanicamente acoplada à perna superior e configurada para girar em torno de um segundo pivô em relação à perna superior. Um dispositivo atuador linear pode ser mecanicamente acoplado a uma segunda extremidade do primeiro membro de ligação e uma segunda extremidade do segundo membro de ligação, e quando atuado, pode fazer com que o primeiro membro de ligação gire em torno do primeiro pivô em relação à perna superior do robô e fazer com que a perna gire em torno do segundo pivô em relação à perna superior.
Aqui estão algumas das ilustrações da aplicação de patente.
A última aplicação de patente que encontramos é particularmente interessante, pois se relaciona especificamente com as mãos do Tesla Optimus. A aplicação de patente é chamada de ‘Mão subatuada com dedos acionados por cabo’. A Tesla escreveu na aplicação de patente:
Um sistema de mão robótica pode compreender uma região de palma e um ou mais dedos, sendo que cada dedo compreende um dispositivo atuador; um membro proximal tendo uma primeira extremidade acoplada mecanicamente à região da palma do robô e configurado para girar em torno de um primeiro pivô em relação à região da palma; um membro distal tendo uma primeira extremidade acoplada mecanicamente a uma segunda extremidade do membro proximal e configurado para girar em torno de um segundo pivô em relação ao membro proximal; e um cabo tendo uma primeira porção acoplada ao atuador e uma segunda porção que se estende ao longo do membro proximal e do membro distal, a segunda porção separada do primeiro pivô e do segundo pivô e tendo uma extremidade com uma dimensão maior do que um diâmetro do cabo, a extremidade com dimensão maior estruturada para engajar o membro distal quando o cabo é puxado pelo atuador.
Achou útil essa informação? Compartilhe com seus amigos!
Deixe-nos a sua opinião aqui nos comentários.